在機器人研發(fā)領域,硬件設計往往是從一塊電路板的焊接開始,直至調(diào)試到讓人「眼瞎」的精細過程。設計出性能卓越、穩(wěn)定可靠的機器人硬件,不僅需要扎實的電子工程基礎,更需要系統(tǒng)性的思維和對應用場景的深刻理解。
一、 基礎筑基:從「焊板」開始
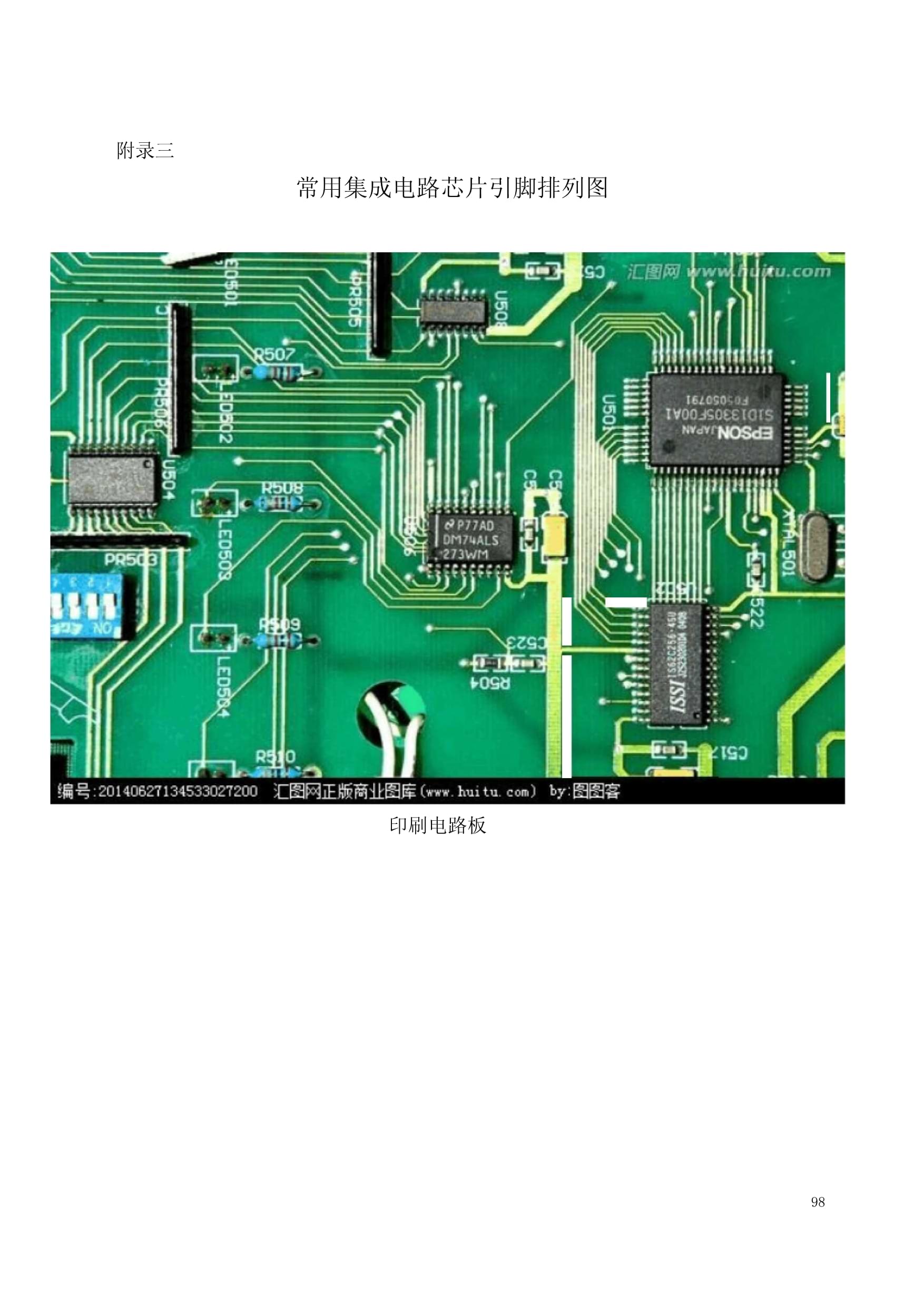
硬件設計的第一步是核心電路與元器件的實現(xiàn)。這包括:
- 主控選型:根據(jù)機器人的計算需求(如實時控制、視覺處理、路徑規(guī)劃)選擇合適的處理器(如MCU、SoC、FPGA)。
- 傳感器融合:精心挑選并布局各類傳感器(如IMU、激光雷達、攝像頭、力覺傳感器),設計其接口電路與供電,確保數(shù)據(jù)采集的準確性與同步性。
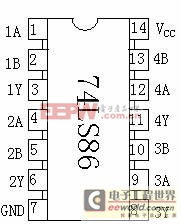
- 動力與驅(qū)動:為電機(伺服、步進、直流無刷等)設計高效的驅(qū)動電路(如H橋),并考慮功率分配、散熱與保護機制。
- 可靠供電:設計多電壓等級的電源樹,確保紋波小、效率高,并在瞬態(tài)負載下保持穩(wěn)定。
這個階段如同搭建骨架,每一個焊點都關乎系統(tǒng)的底層穩(wěn)定性。
二、 集成挑戰(zhàn):跨越「信號」到「系統(tǒng)」的鴻溝
當各個模塊電路板就緒,真正的挑戰(zhàn)在于系統(tǒng)集成:
- 信號完整性:高速數(shù)字信號(如攝像頭數(shù)據(jù)、以太網(wǎng))和模擬信號(如傳感器微弱信號)需考慮走線、阻抗匹配、屏蔽,防止干擾與衰減。
- 電磁兼容:機器人內(nèi)部電機驅(qū)動、開關電源都是強干擾源,必須通過濾波、接地、布局優(yōu)化通過EMC測試,避免自擾和擾他。
- 機械與熱設計:硬件需要裝入機械結構,需考慮PCB形狀、接插件位置、散熱路徑(如利用殼體、添加導熱墊或風扇)。
- 連接與布線:設計可靠的線束與連接方案,確保在運動、振動中接觸良好,并便于組裝維護。
集成過程常常需要反復調(diào)試,工程師盯著示波器波形和邏輯分析儀數(shù)據(jù),直至深夜,可謂「眼瞎」的初級階段。
三、 設計升華:如何做到「牛X」?
超越基本功能,打造卓越硬件,需要注入更多前瞻性思考:
- 模塊化與可擴展性:采用標準接口(如CAN FD、以太網(wǎng)、FPC),使計算、傳感、驅(qū)動模塊易于升級或替換,適應算法迭代和任務變化。
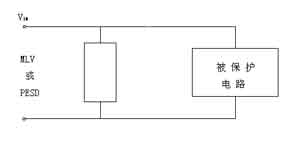
- 健壯性與容錯:關鍵部件(如主控、電源)考慮冗余設計;電路加入過壓、過流、ESD保護;軟件硬件協(xié)同實現(xiàn)安全狀態(tài)監(jiān)測與恢復。
- 人機交互與調(diào)試友好:預留充足的調(diào)試接口(如SWD、UART)、狀態(tài)指示燈,甚至設計配套的上位機配置工具,大幅降低開發(fā)與現(xiàn)場排查難度。
- 成本與量產(chǎn)優(yōu)化:在性能與成本間取得平衡,選擇合適商用等級元器件,設計易于自動化焊接和測試的PCB布局,為最終量產(chǎn)鋪路。
四、 持續(xù)迭代:在「眼瞎」中追求完美
優(yōu)秀的硬件設計絕非一蹴而就。它需要:
- 嚴格的測試:進行高低溫、振動、長時間老化等可靠性測試,暴露潛在問題。
- 現(xiàn)場反饋閉環(huán):收集實際應用中的數(shù)據(jù)(如故障率、性能瓶頸),驅(qū)動下一版本的改進。
- 軟硬協(xié)同優(yōu)化:與算法團隊緊密合作,有時通過硬件加速(如專用ISP、AI芯片)來突破性能瓶頸。
這個過程,是無數(shù)次修改PCB、調(diào)試參數(shù)、分析故障的循環(huán),是對工程師視力與毅力的終極考驗,也是將創(chuàng)意轉(zhuǎn)化為堅實物理存在的必由之路。
###
從焊接第一塊電路板到打造出穩(wěn)定強大的機器人硬件系統(tǒng),是一條融合了電子工程、機械設計與系統(tǒng)思維的漫長道路。其中不乏令人「眼瞎」的繁瑣調(diào)試,但正是對每一個細節(jié)的執(zhí)著,對可靠性、擴展性和用戶體驗的不懈追求,最終定義了硬件設計的卓越與否。記住,偉大的機器人,始于一塊精心設計的電路板,成于無數(shù)個深夜調(diào)試的堅持。